足球機械人設計與製作
作者:劉孝忠 (2007-12-25)
藉由 CmuCam 彩色影像模組抓取足球之顏色,利用影像程式將球之顏色、形心、大小作出判斷,判斷其角度、距離,然後由控制程式作出相對應的指令後,進而指揮足球機械人員作出相對應之動作,抓住球並射門得分。
製作及組裝過程
步驟一:
先裝製電池盒在機架下方
再來將萬向輪與萬向輪支撐架互相鎖緊,在將支撐架的兩旁垂直90度的板金與機架栓緊,讓萬向輪與機架能固定及平衡。

步驟二:
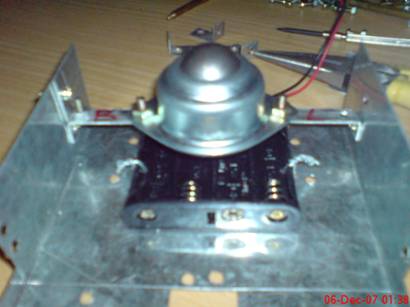
再來將機架本體上方的長方形孔裝置180度伺服馬達,即為擊球機構的動力。
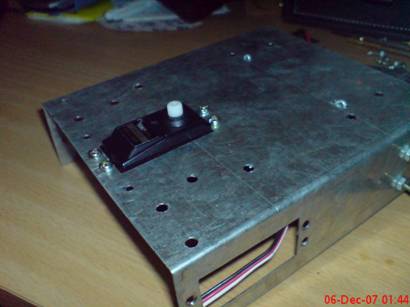
將機架上方鑽4個圓孔放置4根銅柱,作為IC控制板的支撐。且順便將2旁的推板銅柱的U型板金鎖住。此步驟本來想先裝置左右兩360度伺服馬達,但因機架設計空間狹小,且考慮拆裝的方便性,所以決定先裝置上方的4根銅柱。

再來馬達前方裝置推板2連桿的支撐架

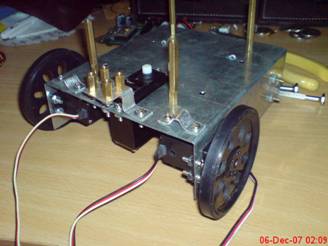
步驟最後再裝置機架兩側的360度伺服馬達並加裝主輪
這樣機架本體下半部的零件就安裝完成了
步驟三:
此步驟先將機架上方2側的180度伺服馬達裝置完成,利用小型L型板金做為伺服馬達與機架做為固定。

再來裝置扣球前蓋,利用一字薄板做為伺服馬達與扣球前蓋兩側的長型板金來連接。

步驟四:
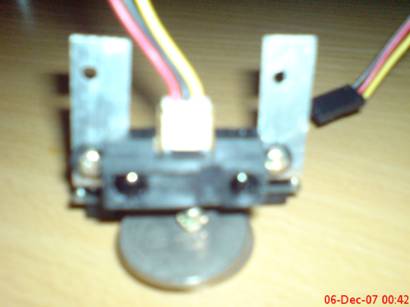
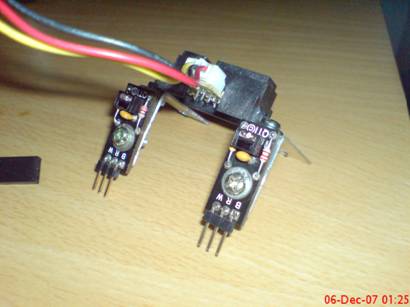
利用兩個L型小型板金在正面的地方裝置紅外線感測器,而下方再裝入紅外線尋邊器。
再將兩個L型小型板金正面上方鑽2個圓孔,裝置推板下方

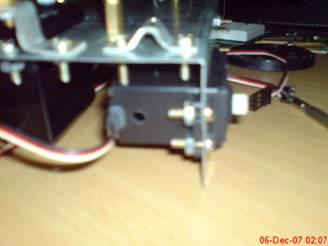
最後將推板、2連桿及十字薄板裝置中間的伺服馬達,並插入2根銅柱於U型小型板金,擊球機構就已完成。

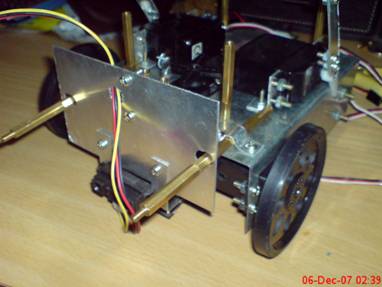

下方圖是近拍擊球裝置


步驟五:
再把IC控制板裝置機架上方,大致上就快完成了。下方圖一為上視圖 圖二為正視圖 圖三為右側視圖



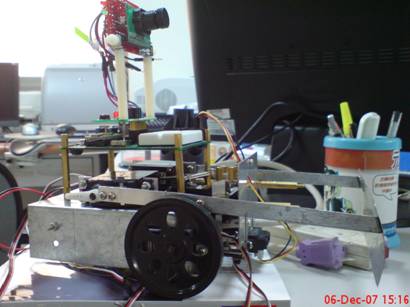
步驟六:
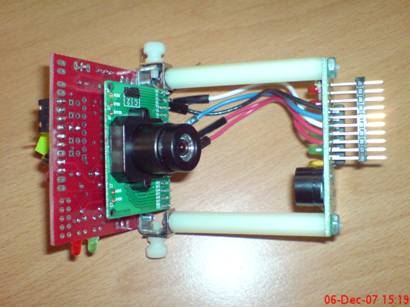
最後再把視覺影像卡裝置在IC控制板上就大功告成了。下方圖一為完成品的上視圖,圖二為正視圖 圖三為左側視圖,圖四為視覺影像卡與機架本體的結合近拍。


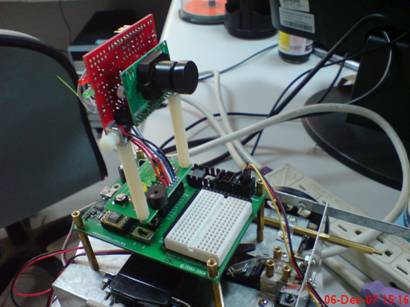
CMUCAM視覺影像卡:利用視覺影像卡找尋球的位置,好讓自走車自動追蹤球。此視覺影像卡是專門針對Parallax Boebot機器人所設計的,使用TTL準位訊號。