利用 WiiFit 經由 Labview 控制 4WD 自走車
作者:劉孝忠 (2008-08-23)
本文旨在設計一台以WiiFit為控制核心,具藍芽操控及無線視覺監控能力之的小型四輪驅動自走車,以 PC端LabView圖控程式中整合無線影像輸入訊號及超音波測距訊號,進而經由藍芽通訊介面遠端操控四輪驅動自走車。
一、4WD自走車簡介
整體架構分為四個系統,分別為機構設計、四輪動力驅動系統、微處理器及超音波感測系統、影像處理及傳輸系統、藍芽無線傳輸系統。
圖1 4WD自走車
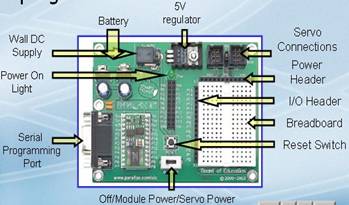
1.1機構設計
底盤設計使用2mm鋁板利用銑床、鑽床及折邊機製作,主要之功能為承載電路控制板、安裝無線攝影機和超音波感測器及提供直流馬達及電池安裝之位置。

圖二 底盤
1.2 四輪動力驅動系統
利用四顆Pololu 30A 高功率DC馬達驅動器,分別控制四顆12V/200RPM直流馬達,利用BasicStamp 微處理晶片控制電路中 H-Bridge的On/OFF來改變直流馬達旋轉方向和速度大小。
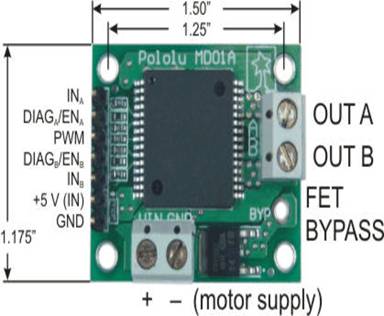
圖三 Pololu 30A 高功率DC馬達驅動器
1.3 微處理器及超音波感測系統
1.3.1 Basic Stamp 單晶片系統
本文利用Basic Stamp 微處理器來控制Pololu 30A 高功率DC馬達驅動器以驅動自走車,接收超音波訊號以避開障礙物,利用RX/TX腳位經由EB500藍芽模組和遠端電腦連線。Basic Stamp 微處理器是以PBASIC程式運行的微型電腦。它有16 個輸入/輸出( I/O )埠,I/O埠可直接連接到按鈕開關、發光二極體、喇叭及其他TTL裝置等。而且加上一至兩個額外元件,接腳更可連接到非TTL裝置,如RS-232 周邊。
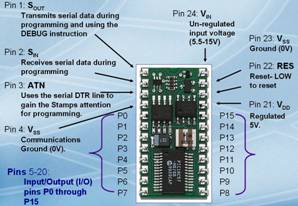
圖四 Basic Stamp I/O腳 圖五 Basic Stamp I/O介面
1.3.1 超音波距離感測器
人類可聽到之聲音頻率在20至20K HZ,超音波距離感測器發射一40K Hz頻率,傳輸之速率為每秒1130呎,當發射之超音波偵測到障礙物,此電路可算出時間並進而計算出相對之距離。
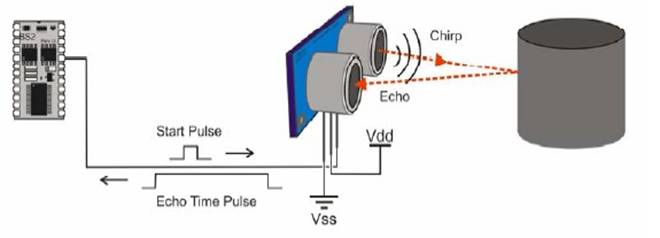
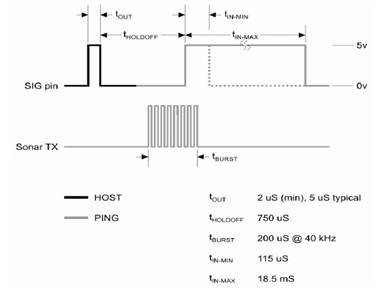
圖六 超音波距離感測器及應用電路
1.4 無線影像傳輸及處理系統
1.4.1 1.2GHz無線攝影機
為了避免和使用2.4GHz傳撥訊號之藍芽模組相互干擾,本文使用奇巧數位科技生產之1.2GHz/500mW無線攝影機,採用超高傳輸頻率不容易受外來電波干擾,可同步傳輸音頻及視頻訊號,傳輸距離可達100公尺,內含自動光線補償,可隨著環境自動調整光圈大小,非常適合自走車無線影音傳輸。

圖七 1.2GHz無線攝影機
1.4.2 USB介面影像擷取器
將無線攝影機所擷取之環境影像經由 Uptech UPG300A USB介面影像擷取器整合至 LabView程式中。

圖八 Uptech UPG300A USB介面影像擷取器
1.5 藍芽傳輸模組
使用PC 端LabView程式,藉由藍芽傳輸遠端控制直流馬達,以操縱自走車前進後退及轉彎等移動,如圖十所示。
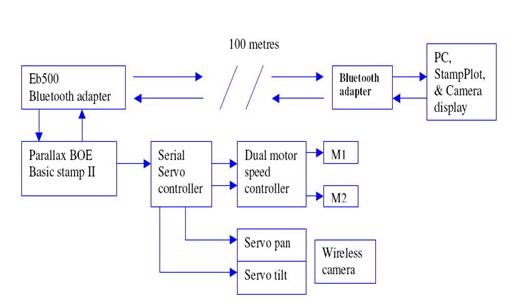
圖九 藍芽遠端操縱自走車流程
1.5.1藍芽無線傳輸模組
EB500 是用來進行藍芽無線通訊的模組,相關腳位如圖十一,將EB500藍芽無線傳輸模組與BS2微處理器連接,EB500上之RX腳位連接 BS2微處理器之P1腳,是用來傳送電腦LabView程式的控制命令料給BS2微處理器,TX 則是傳送超音波感測器訊號資料給遠端電腦。自走車藉由EB500 接收電腦端指令並且於P0 讀取,接收到資料後判別為何種運動模式,然後更改馬達控制板的INA 以及INB 的電位.馬達控制板會根據這兩個電位使直流馬達作出對應的轉動方向。
圖十 EB500藍芽無線傳輸器腳位
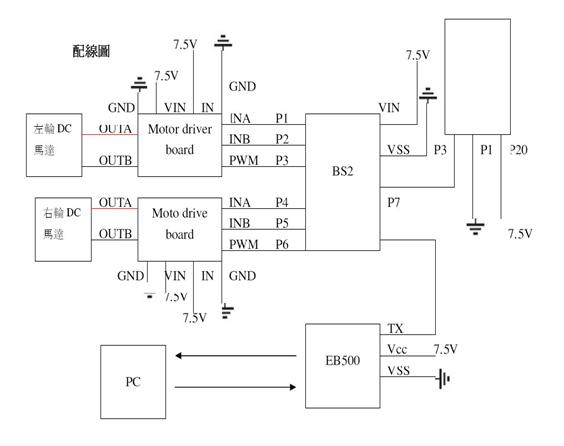
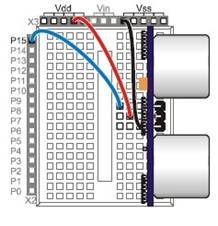
圖十一藍芽遠端操縱自走車配線圖
二、WiiFit簡介
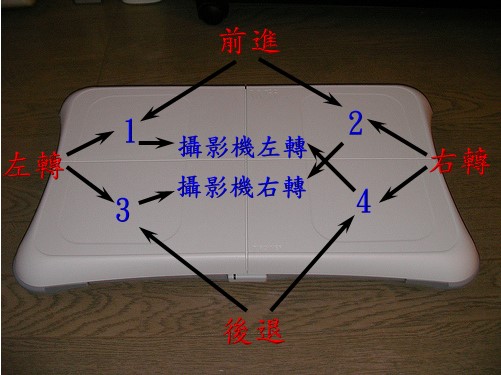
WiiFit利用藍牙與遊戲主機連結,最多可同時使用4支Wiimote,最遠感應距離為遊戲主機外10公尺。本文利用 Labview 圖控程式藉由 Eb500 藍牙接收器遠端控制 4WD自走車,其過程為將WiiFit訊號傳入Labview 圖控程式,經過適當處理再經由 Eb500 藍牙接收器遠端控制 4WD自走車。例如踩 1、2前進,踩 1、4攝影機向左。

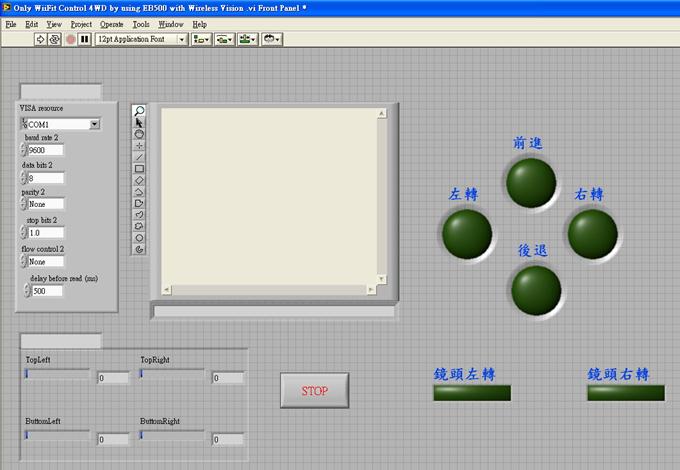
四、Labview
![]() 程式介面
程式介面
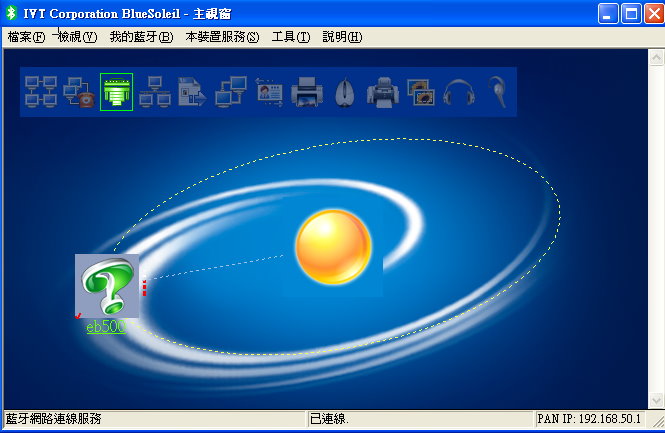
EB500 藍芽及WiiFit和 IVT BlueSoleil 連接設定
一、首先安裝 IVT BlueSoleil 藍芽傳輸軟體(BlueSoleil VoIP 3.2.2.8)
二、接下來將 USB 藍芽傳輸器插入電腦 USB 端

三、啟動IVT BlueSoleil 藍芽傳輸軟體

四、電腦與 WiiFit始連接
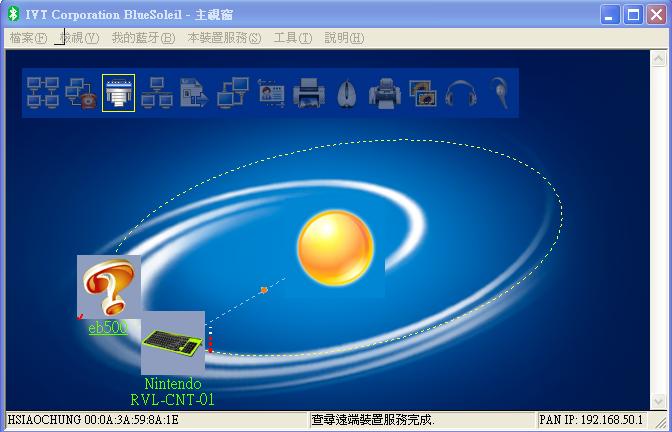
五、電腦與 EB500 開始連接