利用超音波感測器來躲避障礙物及追蹤物體之履帶自走車
作者:劉孝忠 (2008-11-02)
本文介紹Parallax生產之超音波感測器,並利用此超音波感測器來躲避障礙物。
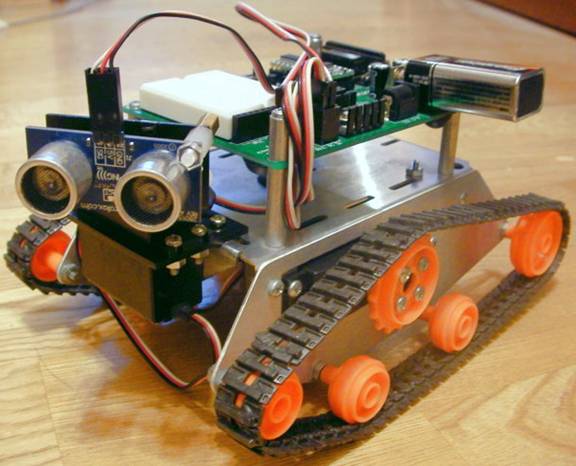
圖1 硬體架構圖
一、超音波距離感測器簡介
人類可聽到之聲音頻率在20至20K HZ,超音波距離感測器發射一40 KHz頻率,傳輸之速率為每秒343.5公尺,當發射之超音波接觸到物體時,此電路可算出時間並進而計算出和障礙物之距離。
Range - 2cm to 3m
Supply Voltage: 5V +/-10%
Supply Current: 30 mA typ; 35 mA max
3-pin interface (power, ground, signal)
20 mA power consumption
Narrow acceptance angle
Simple pulse in / pulse out communication
Indicator LED shows measurement in progress
Input Trigger - positive TTL pulse, 2 µs min, 5 µs typical.
Echo Pulse - positive TTL pulse, 115 µs to 18.5 ms
Echo Hold-off - 750 µs from fall of Trigger pulse
 Burst
Frequency - 40 kHz for 200 µs
Burst
Frequency - 40 kHz for 200 µs
圖2 超音波距離感測器
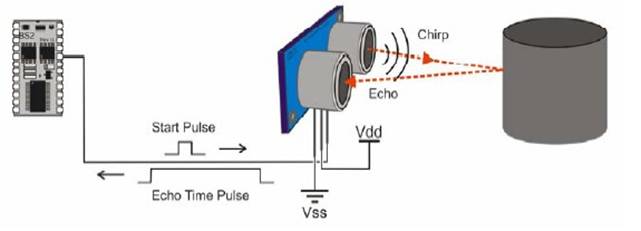
圖3 超音波距離感測器及應用電路
二、超音波距離感測器旋轉台製造
1、首先利用 AutoCad 畫出伺服馬達承載台,轉換圖檔後利用CO2 雷射加工機切割出伺服馬達承載台,然後利用螺絲鎖在自走車前端。



圖4 伺服馬達承載台
2、將超音波距離感測器安裝於 Lynxmotion 公司之Multi-Purpose Sensor Housing 上。

圖5 Multi-Purpose Sensor Housing